I find this video very interesting because it contains more camera data then usual, that you can use to conduct rudimentary target motion analysis. First, I wanted to determine the camera system used, and it appears to be the SAFIRE system as described in the release. You can find a video here of older SAFIRE systems that looks pretty much bang on to what the video has:
Source: https://www.youtube.com/watch?v=Eh06nCegv5g
Based off that, I found a manual for the older Star SAFIRE III system and looked up some of the HUD data to see if I could get some more insight. The LCS uses the "Sea Star SAFIRE" on its main mast for fire control, but I obviously couldn't find a manual for that one. This older manual covers enough though. First item of note, at 0:04 in the video you can see the FOV change, and later at 0:30 you can see "UNFOV" in the top left corner. Apparently this stands for "Ultra-Narrow FOV" and (based off the older manual) is a 2 x electronic zoom of the Super Narrow FOV, and is the highest zoom possible for the system. Second, the manual doesn't mention this but based off quick analysis of the previously linked video, the arrow in the bottom right is a north seeking arrow and points towards where north should be. The box at the top right is for the Laser Range Finder, and indicates it is armed but not receiving any return, so no range data. Finally, the bottom of the screen has what I think is the most interesting data. The lat/long display is for the ships location. The "Az" display indicates the relative azimuth to the target from the *centerline* of the camera system, with positive numbers going up from 0 to 180 being on the right side of the centerline, and negative numbers from 0 to -180 being the left side of the centerline. You can confirm this with the video I posted. I imagine that "0" for this camera system is towards the bow of the ship, as it is used to control the gun system, and anything else would probably be terribly confusing to the fire control crews. "El" is also displayed, which is the elevation of the camera above or below the horizontal centerline. Like previously mentioned, the SAFIRE camera is mounted on the LCS mast, and I imagine it is fairly high up there to allow for a farther view. If we can calculate the height of the LCS mast and pinpoint the camera location, you could actually come up with a pretty good estimate of how far the horizon is in the video.
So, based off the display data we had and using time stamps from the video, I plotted the ship's locations in Google Earth over the entirety of the video, time stamped them, and noted the azimuth to target that was indicated. Once I plotted the locations, I determined the ships heading (as previously mentioned, roughly due west), added the relative indicated bearing that the "Az" display shows, and came up with a TRUE bearing from the indicated Lat/Long position to the target. This can then be plotted in Google Earth. For example: At 05:52:52, the ship is roughly on heading 268, and the "Az" display shows a "15", or 15 degrees off the bow, to the starboard side; 15 degrees plus 268 degrees give you a true bearing to target of 283 degrees.
I broke the video down into two parts: before and after the cut. During the time between cuts, the ship moves west almost 1900 meters. I plotted the ships location 5 times for each segment. The first segment was roughly 27 seconds long, and the ship covered 131 meters in that period (ship speed about 9.5 knots). The second segment was also 27 seconds long, covering 123 meters (ship speed about 8.8 knots). Below is a snip from Google Earth showing the first segment. The pins are the ship's location, and the bright red line from each pin is the true bearing to the target, based off the camera data. The dark red line is an estimated course based of the plotted locations of each pin. For reference, the point where the last 3 lines intersect is 180m from the last pin.

This second snip is from after the cut. Same deal as above, but with green lines.

And here is a wider shot from Google Earth... the numbered pins in the top left indicate the sequential order of azimuth bearings. The lines all go out to 30KM from the ship location. I'm not entirely sure what to make of it. Clearly what ever this phenomenon was, it reversed course and moved west during the time between cuts, or there was a second target, or maybe there is a glitch in the camera's tracking system. The target might also be 10,20 or 30km out, moving on north track during the first cut and on a southerly track during the second cut. I've included an attachment of the KMZ I'm using, so please feel free to double check my data
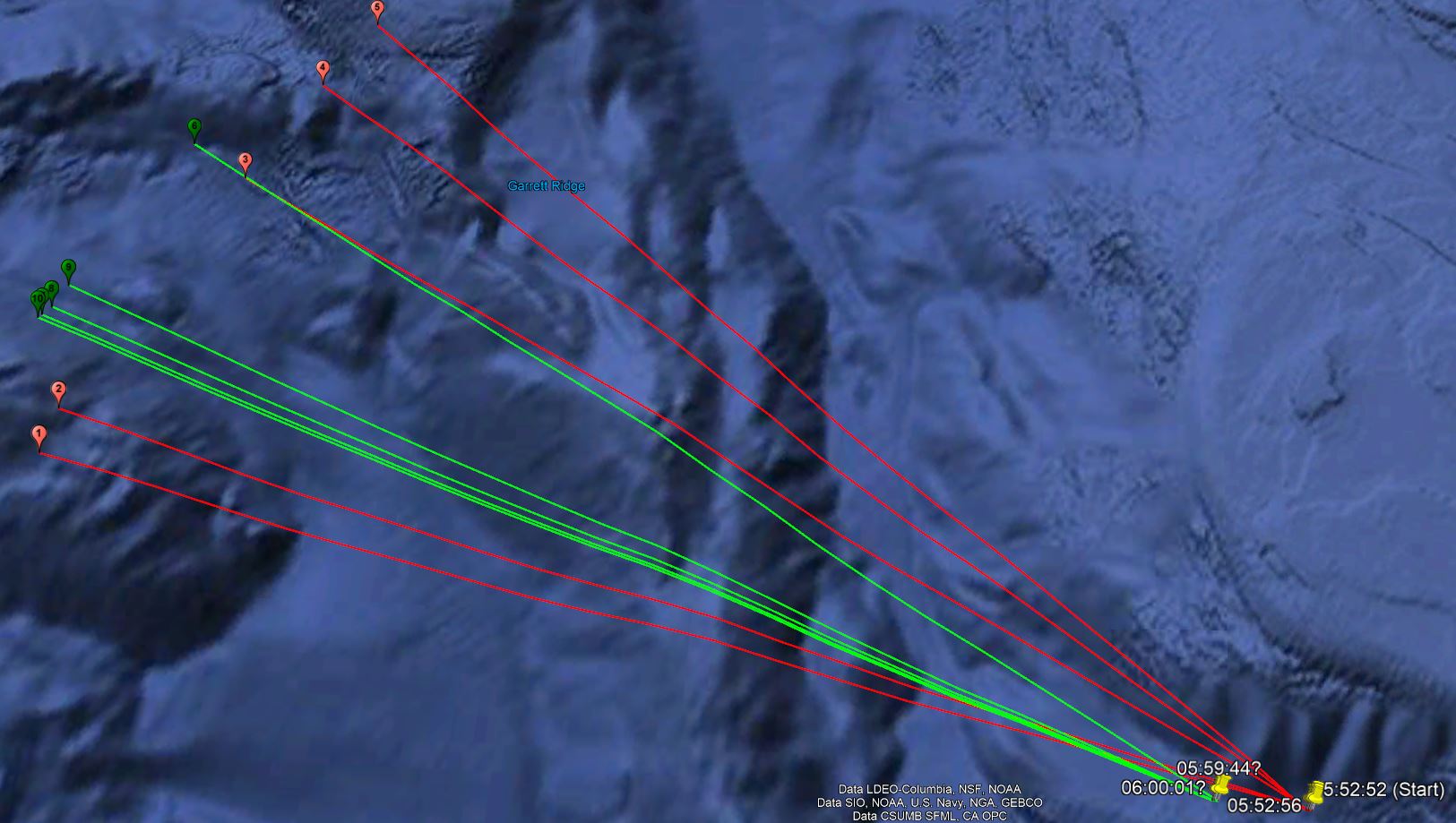
Also, not trying to over explain anything here with the in-depth descriptions of true vs. relative bearing or anything else, just trying to show my work so others can double check me... Maybe I'm really off base here on how these camera systems work. I also didn't really analyze the elevation data of the camera system, since it seemed to bounce all over the place. I attribute this to camera stablization and the ship bobbing in the high swells the crew mentioned in the video. Could be wrong though.
Source: https://www.youtube.com/watch?v=Eh06nCegv5g
Based off that, I found a manual for the older Star SAFIRE III system and looked up some of the HUD data to see if I could get some more insight. The LCS uses the "Sea Star SAFIRE" on its main mast for fire control, but I obviously couldn't find a manual for that one. This older manual covers enough though. First item of note, at 0:04 in the video you can see the FOV change, and later at 0:30 you can see "UNFOV" in the top left corner. Apparently this stands for "Ultra-Narrow FOV" and (based off the older manual) is a 2 x electronic zoom of the Super Narrow FOV, and is the highest zoom possible for the system. Second, the manual doesn't mention this but based off quick analysis of the previously linked video, the arrow in the bottom right is a north seeking arrow and points towards where north should be. The box at the top right is for the Laser Range Finder, and indicates it is armed but not receiving any return, so no range data. Finally, the bottom of the screen has what I think is the most interesting data. The lat/long display is for the ships location. The "Az" display indicates the relative azimuth to the target from the *centerline* of the camera system, with positive numbers going up from 0 to 180 being on the right side of the centerline, and negative numbers from 0 to -180 being the left side of the centerline. You can confirm this with the video I posted. I imagine that "0" for this camera system is towards the bow of the ship, as it is used to control the gun system, and anything else would probably be terribly confusing to the fire control crews. "El" is also displayed, which is the elevation of the camera above or below the horizontal centerline. Like previously mentioned, the SAFIRE camera is mounted on the LCS mast, and I imagine it is fairly high up there to allow for a farther view. If we can calculate the height of the LCS mast and pinpoint the camera location, you could actually come up with a pretty good estimate of how far the horizon is in the video.
So, based off the display data we had and using time stamps from the video, I plotted the ship's locations in Google Earth over the entirety of the video, time stamped them, and noted the azimuth to target that was indicated. Once I plotted the locations, I determined the ships heading (as previously mentioned, roughly due west), added the relative indicated bearing that the "Az" display shows, and came up with a TRUE bearing from the indicated Lat/Long position to the target. This can then be plotted in Google Earth. For example: At 05:52:52, the ship is roughly on heading 268, and the "Az" display shows a "15", or 15 degrees off the bow, to the starboard side; 15 degrees plus 268 degrees give you a true bearing to target of 283 degrees.
I broke the video down into two parts: before and after the cut. During the time between cuts, the ship moves west almost 1900 meters. I plotted the ships location 5 times for each segment. The first segment was roughly 27 seconds long, and the ship covered 131 meters in that period (ship speed about 9.5 knots). The second segment was also 27 seconds long, covering 123 meters (ship speed about 8.8 knots). Below is a snip from Google Earth showing the first segment. The pins are the ship's location, and the bright red line from each pin is the true bearing to the target, based off the camera data. The dark red line is an estimated course based of the plotted locations of each pin. For reference, the point where the last 3 lines intersect is 180m from the last pin.
This second snip is from after the cut. Same deal as above, but with green lines.
And here is a wider shot from Google Earth... the numbered pins in the top left indicate the sequential order of azimuth bearings. The lines all go out to 30KM from the ship location. I'm not entirely sure what to make of it. Clearly what ever this phenomenon was, it reversed course and moved west during the time between cuts, or there was a second target, or maybe there is a glitch in the camera's tracking system. The target might also be 10,20 or 30km out, moving on north track during the first cut and on a southerly track during the second cut. I've included an attachment of the KMZ I'm using, so please feel free to double check my data
Also, not trying to over explain anything here with the in-depth descriptions of true vs. relative bearing or anything else, just trying to show my work so others can double check me... Maybe I'm really off base here on how these camera systems work. I also didn't really analyze the elevation data of the camera system, since it seemed to bounce all over the place. I attribute this to camera stablization and the ship bobbing in the high swells the crew mentioned in the video. Could be wrong though.