So, let's apply some logic.
• We know the software shows "no data" as black.
• The drone was fairly stationary, creating "no data" shadows behind large objects such as trees.
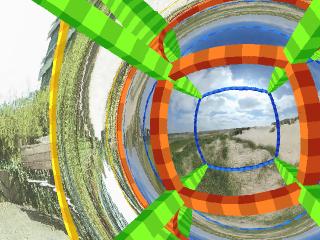
• We can determine the drone position from the "shadows", and it's the very center:
• There is a black "no data" spot below the drone because the Lidar never looked straight down.
• The black spot has circular arcs because the drone or the Lidar sensor rotated.
• The reflectivity diagram shows a red semicircle of high reflectivity, also centered on the drone position.
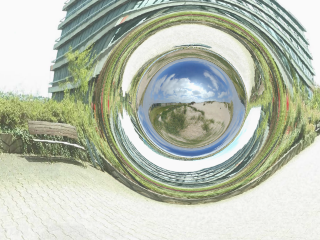
• The RGB diagram does not show that circle, and satellite images of the area don't, either.
• The drone operators did not see anything unusual at the time.
Inferences:
• If this was a circular feature, the circle would not be incomplete.
• If there was an invisible feature in the area, it would be highly unlikely that the drone was centered on it by chance.
| Imagine throwing a dart at a dart board: how hard is it to hit the bullseye exactly? Now do it with an invisible dartboard (that you don't know is there)! If that circle exists in reality, flying the drone to its exact center is basically impossible. |
• Therefore, the circular arc was caused by the drone.
• Its shape is circular because the lidar rotated in place.
• It's possible that the red data represents some sort of equipment error in the Lidar.
If this was a real wormhole, flying the drone to its exact center would've made it vanish, as it traveled the universe.
There was no wormhole there.