With my ears trained on California accents over the last 30 years, I hear the WSO say: "X, this is a fuckin' done, bro" where X is a mumbled exclamatory either "dude" or "yeah". His tone is very dismissive, but changes markedly when the pilot tells him to look at a "whole fleet" of other objects on the Situational Awareness display. The WSO then non-dismissively exclaims "My gosh." But I don't understand the significance of the next exchange:
Pilot: That's not L&S is it?
WSO: That IS L&S, dude.
Pilot: Well the FLIR's looking...
WSO: Look at this thing!
L&S is launch & steer, the F-18's targeting systems' focus of attention. Could someone explain the implications in this scenario of "is L&S" being true vs false? And why would they a) initially disagree on L&S status, and b) need to ask each other about it? And why would the pilot respond to the disagreement by making a comment about the FLIR?
The video remains quite unremarkable. It's only interesting because of its connection to a few eyewitness accounts of retired personnel. We only have hearsay and surmises about what kind of official investigation was done, and what its findings might have been. I'm skeptical that the forthcoming report will provide sensor data that rules out any possible explanation involving some combination of balloons/drones/distant jet.
I've listened to it again at different speeds, and I stand corrected, it sounds more like one of the following:
(a) "it is a f***ng drone bro"
(b)"it isn't a f***ng drone bro"
(c) "it ain't a f***ng drone bro" (less likely)
3 reasons push me to lean towards B:
1) the length of that word within the sentence (option A would sound/flow very unnatural)
2) when he later says "that IS L&S dude", in the way he says "IS", the ending sound is quite discernably different from the previous sentence, which sounds more like he says "isn't" and sort of chewing the ending sound.
3) C is less likely because I think we can distinctively hear the "I" and "S" being pronounced.
I am more and more convinced of this interpretation, but admittedly I am not a native speaker, so...
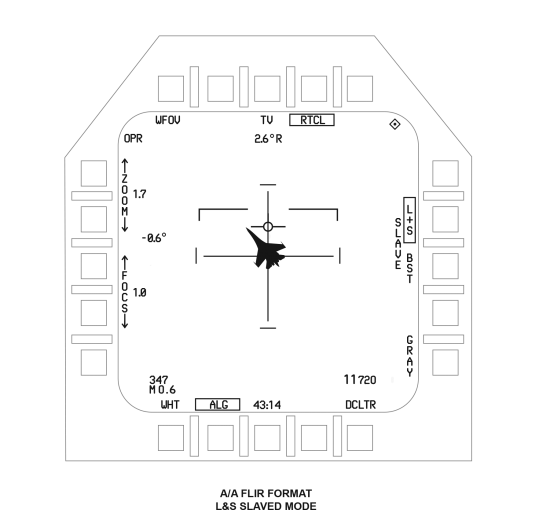
Regarding the significance of L&S slaved mode, my understanding is that this is the mode used to designate a target and possibly launch a missile at it, which means that there will be guidance provided to "steer" the aircraft to maintain radar and FLIR lock on the target to allow the missile to hit. The implication of ATFLIR to be L&S slaved to that target, is that they had radar lock on the target and were looking at this particular target both on the radar and ATFLIR.
(please correct me if my understanding is wrong)
Speculation: they might be impressed by what they see on the radar, and hence might not be sure that this is indeed what the ATFLIR is also tracking.
EDIT: nevermind, looking at markus's post above and at the manuals again, my interpretation above of the L&S mode significance is likely wrong. It's possible the WSO got confused, unless that ATFLIR somehow works differently?
EDIT2: Sorry, after more thought, I came to a different conclusion, also looking at this source:
https://members.tripod.com/56th_fightergroup/training.htm#flir symbols
My hypothesis is that the ATFLIR pod is currently not "L&S Slaved", hence why the "L+S" symbol is not boxed, and hence why the question by the pilot to the WSO. Since it's neither in L+S nor BST Slave mode, it must be on "Autotrack" - which is later confirmed, btw - which means the pod is tracking the object.
However, my hypothesis is that, even if the the pod is not "Slaved" to the L&S target, the target they are autotracking is indeed the L&S target, and that's exactly what the WSO points out when he says "that IS on L&S dude". There's nothing preventing you to autotrack the same target that the radar has designated as L&S, even if not slaving the FLIR pod.
To answer
@markus question, I none of the manuals/sources I found (below) about the A/A ATFLIR mode there seems to be any indication of target range (RNG), so that might be the reason. The Gofast video had the ATFLIR in A/G (Air to ground) mode, which does have target RNG.
ATFLIR manuals/sources:
https://forums.vrsimulations.com/su...ard_Looking_Infrared_(FLIR)#L.26S_Slaved_Mode
https://members.tripod.com/56th_fightergroup/training.htm#target flir
https://forums.vrsimulations.com/support/index.php/Air-To-Air_Systems
https://info.publicintelligence.net/F18-EF-000.pdf
https://www.cnatra.navy.mil/local/docs/pat-pubs/P-820.pdf
https://forums.vrsimulations.com/support/index.php/A/G_Advanced_Targeting_FLIR_(ATFLIR)
")