MclachlanM
Active Member
Had a go at getting some examples from the ATFLIR in DCS to try and get an estimate for the size of the UFO, below is a small-ish single engine jet (CASA C-101CC Aviojet) at 10nmi flying directly away at the same altitude and speed. The bottom four are in IR white hot mode with the same FOV, just changing the image settings and it seems that you can get a variety of different looking shapes as well as being able to make the body disappear while the nozzle and reticule bars remain clear (middle left).
It's possible to get something to look similar to the GIMBAL footage although I should stress that the ATFLIR has only recently been added to DCS so still has some bugs and will never be able to perfectly simulate things like glare, smudges on the glass etc. Not sure how close it would need to be for it to be unmistakeably a jet, also not sure on the range that the pilot could identify it by eye as I don't have access to a real F-18.

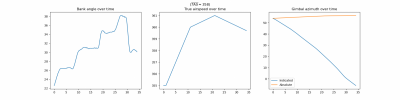
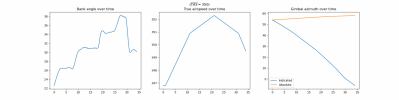
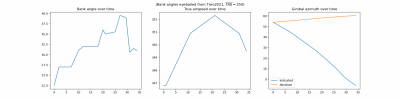
I can't quite get my head around working out the milliradians that Chris mentioned so I found a very rough way to estimate the size just using the ratio of reticule bars to the velocity vector and the range. Considering that the reticule and vector are approximately the same size in the video a good rule of thumb seems to be Range (nmi) = Size (m).

If the GeoGebra stuff is correct and this way of finding the size is OK, I can't see any reason why a small jet flying away from the f-18 with afterburners and slightly incorrect settings isn't consistent with what we are seeing in the video.
It's possible to get something to look similar to the GIMBAL footage although I should stress that the ATFLIR has only recently been added to DCS so still has some bugs and will never be able to perfectly simulate things like glare, smudges on the glass etc. Not sure how close it would need to be for it to be unmistakeably a jet, also not sure on the range that the pilot could identify it by eye as I don't have access to a real F-18.
I can't quite get my head around working out the milliradians that Chris mentioned so I found a very rough way to estimate the size just using the ratio of reticule bars to the velocity vector and the range. Considering that the reticule and vector are approximately the same size in the video a good rule of thumb seems to be Range (nmi) = Size (m).
If the GeoGebra stuff is correct and this way of finding the size is OK, I can't see any reason why a small jet flying away from the f-18 with afterburners and slightly incorrect settings isn't consistent with what we are seeing in the video.