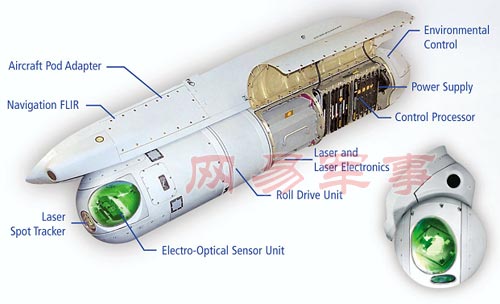
I believe the portion of the system you show is the rearward portion...
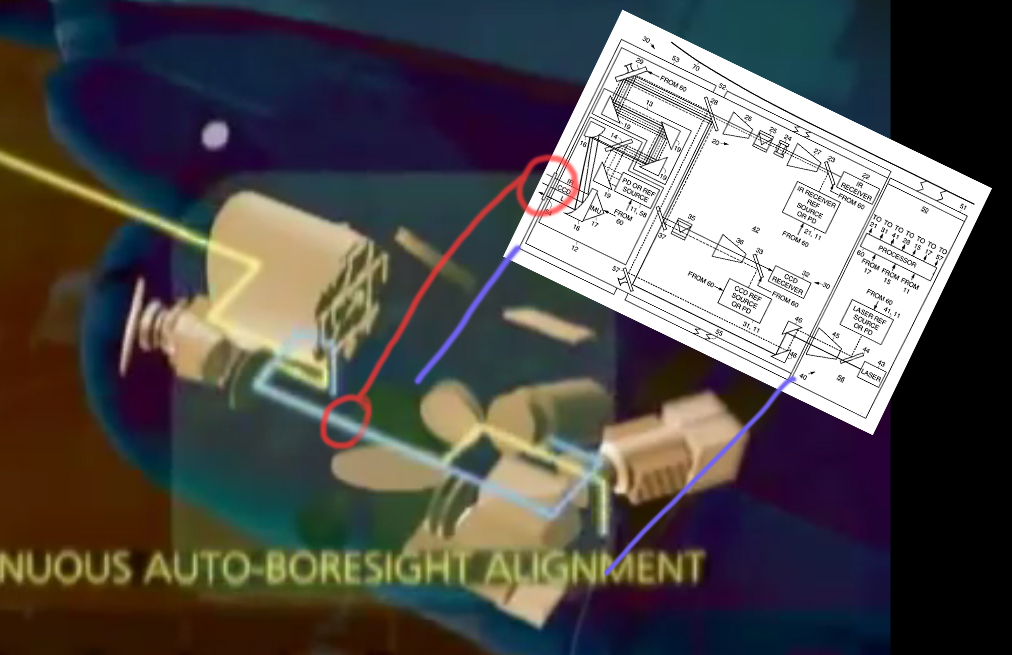
A Raytheon patent you linked to, which seems to be for the forward camera in the ATFLIR, says 'gimbal lock' can occur when LOS = 0˚ (which is also "roll axis BB"), and to avoid that gimbal lock, rotational adjustments are made...
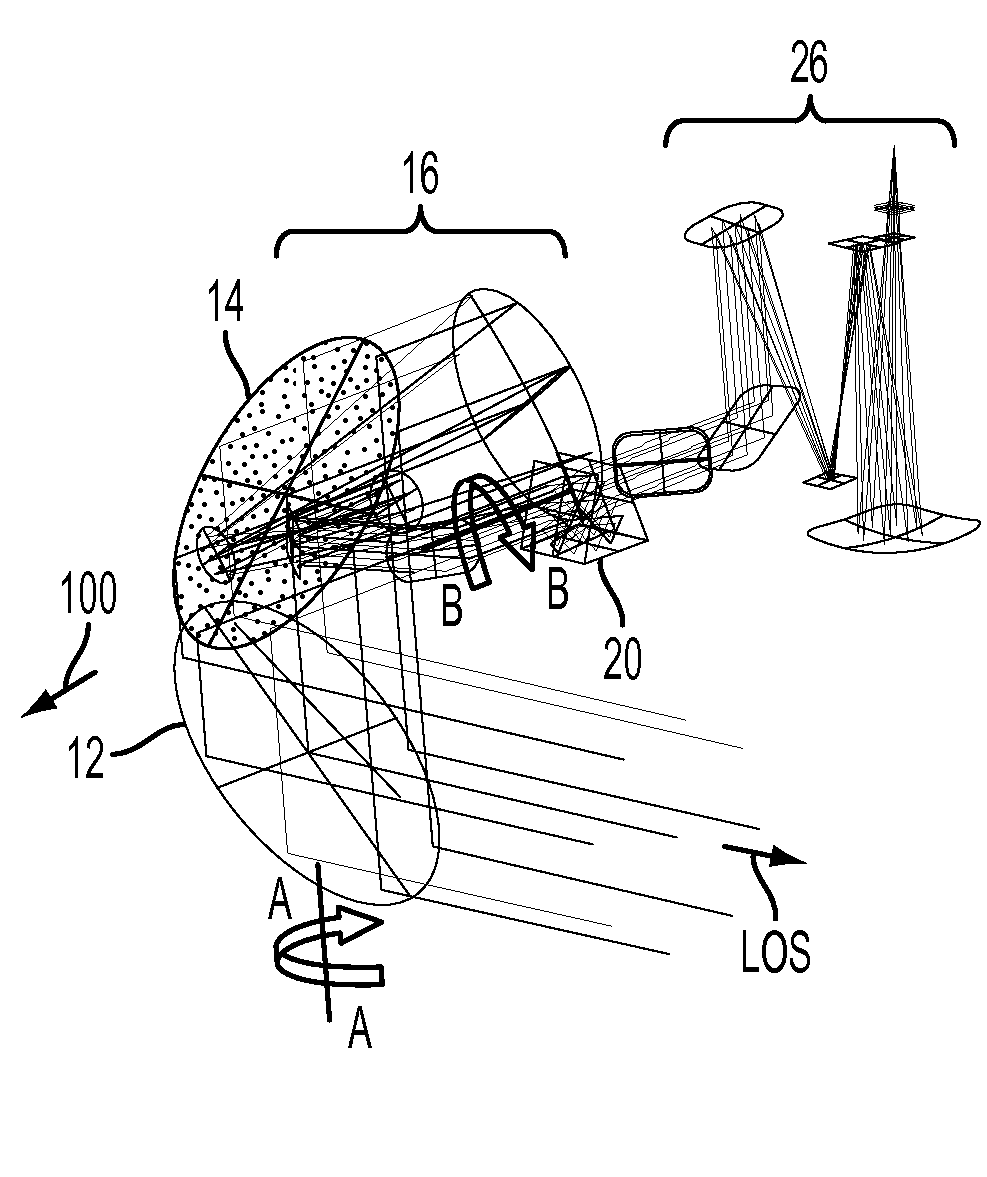
[0035] ... The situation where the LOS is precisely parallel to roll axis BB and thus causing the roll axis BB to not steer the LOS is called a "gimbal singularity" or "gimbal lock." A control gain of roll axis BB is proportional to 1/sin α. Hence, the gain of roll axis BB can go to infinity when α is equal to 0, i.e., when the LOS is precisely parallel to roll axis BB. From the standpoint of an automated control system 90 (shown in FIG. 1) for controlling the orientation of c-mirror 12, i.e., controlling the rotation around roll axis BB and rotation around axis AA, this gimbal singularity may be problematic because no amount of rotation around roll axis BB produces any desired effect of steering the LOS.
[0036] As a result, in certain applications, the gimbal singularity is to be avoided. However, in an embodiment, where the gimbal singularity cannot be avoided, for example because the gimbal singularity is within the desired field of regard (FOR), then it may be desirable to provide a third gimbal axis TT (shown in FIG. 1). In one embodiment, third gimbal axis TT is within the plane of c-mirror 12 and is perpendicular to rotation axis AA. In one embodiment, the third gimbal axis TT resides on rotation axis AA of c-mirror 12 in that a rotation of c-mirror 12 around axis AA produces a rotation of axis TT. The third gimbal axis TT can be of small angular travel (for example, less than or equal to 5 deg.). As a result, axis TT travels around roll axis BB and avoids the gimbal singularity.
[0037] For example, when an object being continuously tracked by moving c-mirror 12 in various directions by rotating around rotation axis AA and/or around roll axis BB and/or optional third axis TT using control system 90 is projected to go close to or through the gimbal singularity, and optional third gimbal axis TT is provided with a range of angles α, for example, ±3 deg, roll axis BB is no longer used for tracking the object within the ±3 deg. range that surrounds the gimbal singularity. Instead, rotation axis AA and third gimbal axis TT are used to continue to track the object within the ±3 deg. angular range. When, on the other hand, the object location exceeds, for example, the 3 deg. singularity, roll axis BB is used by control system 90 in the tracking motion. In this case, the third axis can be gradually returned to 0 deg. and no longer has involvement in the tracking motion. In other words, control system 90 controls the tracking by rotating c-mirror 12 around third gimbal axis TT when an object is located closely around the singularity (e.g., within the ±3 deg. range). Otherwise, when the object is outside the ±3 deg. range around the singularity, control system 90 controls the tracking by rotating roll axis BB and leaving the third axis TT fixed or returning third axis TT to 0 deg.
If I'm reading that right, it says rotational adjustment in the optics are made as the LOS sweeps across 0˚.
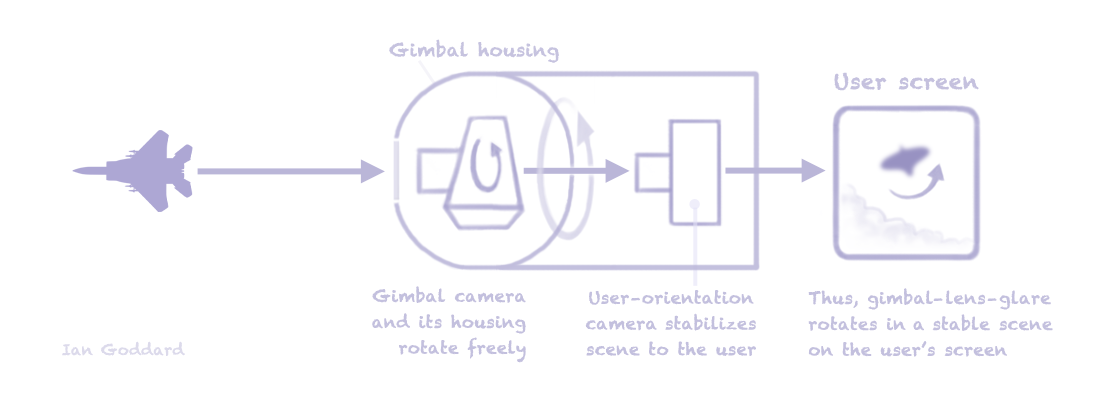
A homespun example of gimbal lock...