Daniel F
Member
Hi there,
This is by no means done with arrogance and claiming to be the correct interpretation. Just think there is enough evidence to warrant the hypothesis and a discussion. Apologies if this is similar in some ways to other threads but felt hypothesis and attached evidence can stand alone.
Hypothesis - The rotation on screen is due to the object rotating, or some other hitherto unknown artefact, rather than a consequence of rotating glare caused by lens rotation.
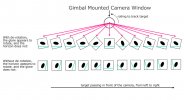
Exhibit A.
Tracking motion of the ATFLIR. A constant rotation is needed to keep track. If glare was the rotating artefact then it would be consistent throughout. This image shows that the lens, bound to two axis, must follow this motion to keep the object in view.

Exhibit B.
Artefacts in sky are rotating with the F18 rather than object.
Very difficult to track the light artefacts in sky. I’ve marked one such area on images with green line. Easier to see in motion, but this shows rotation of object in relation to artefacts in sky and rotation of F18 in relation to artefacts in sky. Though neither are perfect, the tracking is more in line with banking of F18 rather the object in sight. Particularly the final large rotation that the object does is not followed by artefacts in sky.

Watch this video by Mick West where the video scrubs back and forth at critical moment. If you block out the object, the rotating artefacts in sky follow rotation of F18. Whereas if you block out the central bars denoting the level of F18, the object seems to continue rotating at a higher rate than said artefacts.
Source: https://youtu.be/4Btns91W5J8
Also the bumps along the way are due to turbulence, culminating in a larger bump at the end, possibly due to changing wind pressure over F18 as it rotates. This happens to coincide with final rotation of object but I postulate that the slight bump in its position is merely due to the turbulence and the camera being zoomed in rather than the camera suddenly rotating.
This is by no means done with arrogance and claiming to be the correct interpretation. Just think there is enough evidence to warrant the hypothesis and a discussion. Apologies if this is similar in some ways to other threads but felt hypothesis and attached evidence can stand alone.
Hypothesis - The rotation on screen is due to the object rotating, or some other hitherto unknown artefact, rather than a consequence of rotating glare caused by lens rotation.
Exhibit A.
Tracking motion of the ATFLIR. A constant rotation is needed to keep track. If glare was the rotating artefact then it would be consistent throughout. This image shows that the lens, bound to two axis, must follow this motion to keep the object in view.
Exhibit B.
Artefacts in sky are rotating with the F18 rather than object.
Very difficult to track the light artefacts in sky. I’ve marked one such area on images with green line. Easier to see in motion, but this shows rotation of object in relation to artefacts in sky and rotation of F18 in relation to artefacts in sky. Though neither are perfect, the tracking is more in line with banking of F18 rather the object in sight. Particularly the final large rotation that the object does is not followed by artefacts in sky.
Watch this video by Mick West where the video scrubs back and forth at critical moment. If you block out the object, the rotating artefacts in sky follow rotation of F18. Whereas if you block out the central bars denoting the level of F18, the object seems to continue rotating at a higher rate than said artefacts.
Source: https://youtu.be/4Btns91W5J8
Also the bumps along the way are due to turbulence, culminating in a larger bump at the end, possibly due to changing wind pressure over F18 as it rotates. This happens to coincide with final rotation of object but I postulate that the slight bump in its position is merely due to the turbulence and the camera being zoomed in rather than the camera suddenly rotating.
") not quite the same field, I think you’ll agree ! I’m just interested in the mechanics of things and working through problems that’s all. This gimbal video is held up as the poster boy for UFO nuts so warrants as deep as analysis as can be managed. It’s really difficult to explain, but I have a stumbling block with the glare theory. We are tracking an object miles away with a zoomed in camera. The object travels a significant distance across. I don’t think that any combination of internal mirrors can do that work. The front pod/ball/gimbal has to be facing the object to keep in view. Its facing a very small spot in the sky, miles away. Once a target drifted past a certain point, no amount of mirror rotation could keep track. I’m just hypothesising that this is a real consideration regarding lens flare. Again, no disrespect intended at all. Its just bothering me and I was wondering if someone could explain some other reason. As Mick says in the video- the gimbal must do a major correction at the centre point as it passes by which in turn cause the glare to rotate.
not quite the same field, I think you’ll agree ! I’m just interested in the mechanics of things and working through problems that’s all. This gimbal video is held up as the poster boy for UFO nuts so warrants as deep as analysis as can be managed. It’s really difficult to explain, but I have a stumbling block with the glare theory. We are tracking an object miles away with a zoomed in camera. The object travels a significant distance across. I don’t think that any combination of internal mirrors can do that work. The front pod/ball/gimbal has to be facing the object to keep in view. Its facing a very small spot in the sky, miles away. Once a target drifted past a certain point, no amount of mirror rotation could keep track. I’m just hypothesising that this is a real consideration regarding lens flare. Again, no disrespect intended at all. Its just bothering me and I was wondering if someone could explain some other reason. As Mick says in the video- the gimbal must do a major correction at the centre point as it passes by which in turn cause the glare to rotate.