
In a video titled "*** 4,519 MILES & NO CURVE! Globe Debunked Once And For All *** RESEARCH FLAT EARTH", Youtuber Paul On The Plane uses a phone with a virtual bubble level app in two locations: Seattle, in the North West of the United States, and Dublin, Ireland.
He first resets the level in Seattle with the phone of the floor, and then switches off the phone. Then after arriving in Dublin he turns on the phone on the floor, and the level reads about the same as it did in Seattle. He claims this is proof that the Earth is flat.
Of course it's not, simply because the phone is measuring which direction is down, i.e. it's measuring the direction that gravity pulls things, which is towards the center of the earth. If you go around the world then this direction changes, but then so do the floors, otherwise they would be sloped. So if the phone is measuring gravity then this result is exactly what you would expect in the real world.
So assuming Paul is being serious here (and that's a big "if") why would he make this rather odd claim?
The justification given is that phones need to be told which way is down. Paul claims that phones don't have any way of actually detecting the acceleration due to gravity. This seems to be based on a misunderstand of how accelerometers work.
Phone have two type of motion detecting sensors. Accelerometers and gyroscopes. The accelerometers detect forces, which here are either actually accelerations, i.e. changes in velocity (where velocity is speed in a particular direction), or the force due to gravity. Gyroscopes detect changes in orientation (the angles). The level apps use the accelerometers, so let's focus on those. How do they work?
Accelerometers are essentially like a tiny mass on a tiny digital scale, miniaturized so it fits flat inside a chip mounted level inside your phone. The weight of the mass (called a "proof mass") changes based on the angle of the scale (and hence your phone), and this change in weight is what tells you how much you are off level. You can demonstrate this with any normal scale.
We've got 500.02 for the scale flat on the table (which seems flat based on my physical bubble level) then 499.83 at an angle. That might not seem like much but we can do the math, which is very simple trigonometry:
acos(499.83/500.02) in degrees = 1.58°
Hence my scale is tilted up around 1.5 degrees, which is consistent with what we see. If the scale is accurate to 0.01 grams, then it can measure angles to an accuracy of 0.36° (acos(499.99/500))
So we can use a scale to measure gravity, and if it's a digital scale inside a phone then we can use the very simple formula acos(tilted weight / flat weight) to get the angle of the scale. This is exactly equivalent to this:
Of course if you took your scale and your 500 gram weight from Seattle to Dublin, you would not expect it to weigh 400 grams in Dublin. It would still weigh 500 grams with the scale placed on the floor. So obviously the same thing is going to happen with your phone.
But how do they make a scale (with a weight on it) that's small enough to fit in your phone? The answer is MEMS. MEMS stand for Microelectromechanical systems, and is basically very tiny machines with electronics that fit inside a very small chip, suitable for including in a phone.
Your phone actually has three. You need three because it's possible to accelerate in a direction that's at right angles to a single sensor (or two sensors) which would then not detect the acceleration - like if it were to move the scale around on a smooth flat surface the weight would remain the same. These three sensors are normally packaged together as a single "3-axis accelerometer".
The design of a three axis accelerometer is interesting because it has to be as flat as possible. This is straightforward for the Y (forward/backwards), and X (left/right) accelerometers axes, which look something like this:
(Source: http://howtomechatronics.com/how-it...-accelerometer-gyrocope-magnetometer-arduino/ )
The proof mass in this case is the red pronged bar in the middle mounted on springs at either end. If you tilt this left or right, then the mass will get closer to the green fixed plates. This changes the electrical capacitance of the device, which can be measured. You can then translate that change in capacitance to the measured weight, and hence the angle relative to gravity (or the amount of acceleration when you move your phone).
There's two of these mounted flat in your phone at right angles for the X and Y directions. But you can't really mount one vertically, as it's a waste of vertical space, would need extra supports, and be difficult to get exactly at 90°. So a better option is an accelerometer that can be mounted flat, but still measures the vertical accelerations.
This is generally what is called a torsion z-axis accelerometer, and it looks a bit like this:
Source: https://www.silicondesigns.com/tech
The upper plate is the proof mass. It's heavier on the right than the left. The torsion bar will twist when a force is applied, moving the upper plate closer to the lower plate, which again causes a detectable change in capacitance, allowing you to measure the weigh of the mass, and hence the direction of gravity. This is basically like my scale+weight setup above, just miniaturized to an extreme.
In summary: all the phone accelerometer is doing (when not accelerating) is measuring the weights of the proof masses in three directions. The weight of the Z-axis proof mass will tell you the angle from horizontal the phone is in. The other weights tell you which direction it is tilted in. This works exactly the same wherever you are on the globe, and it needs no calibration to tell it which way is down.
We can actually verify this in another way - by looking at the library Apple provides for developers to access the raw accelerometer data. This is the Core Motion API, and it provides functions for getting the raw X, Y, and Z accelerometer values. But it does NOT provide any means of specifying a "down" direction. The phone just measures it.
https://developer.apple.com/documentation/coremotion/getting_raw_accelerometer_events
So with the phone laying flat, anywhere in the world the value from the Z-axis accelerometer is going to be g. We can see this by looking at the raw values (which again cannot be calibrate at the raw level):
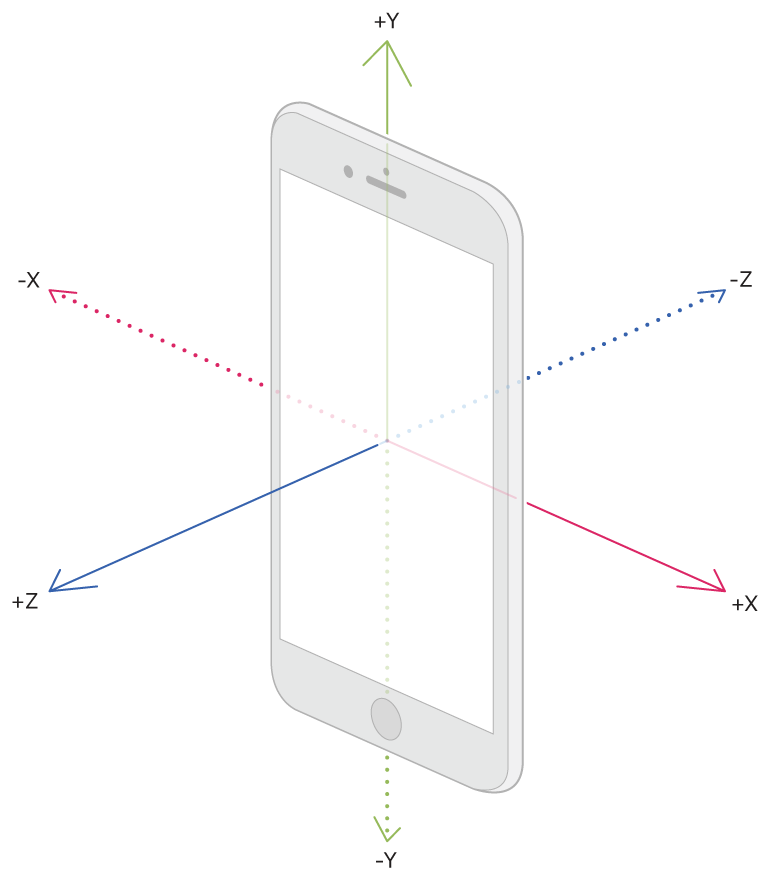
An accelerometer measures changes in velocity along one axis. All iOS devices have a three-axis accelerometer, which delivers acceleration values in each of the three axes shown in Figure 1. The values reported by the accelerometers are measured in increments of the gravitational acceleration, with the value 1.0 representing an acceleration of 9.8 meters per second (per second) in the given direction. Acceleration values may be positive or negative depending on the direction of the acceleration.
Figure 1
Accelerometers measure changes in velocity along the x, y, and z axes
Accelerometer is at the top. Now in theory this should by Z=-9.81, but sensor noise, very minor mounting differences, and manufacturing variables mean that it's not particularly exact. It's certainly in the right ballpark, just 2% off.
Last edited: